
Hot
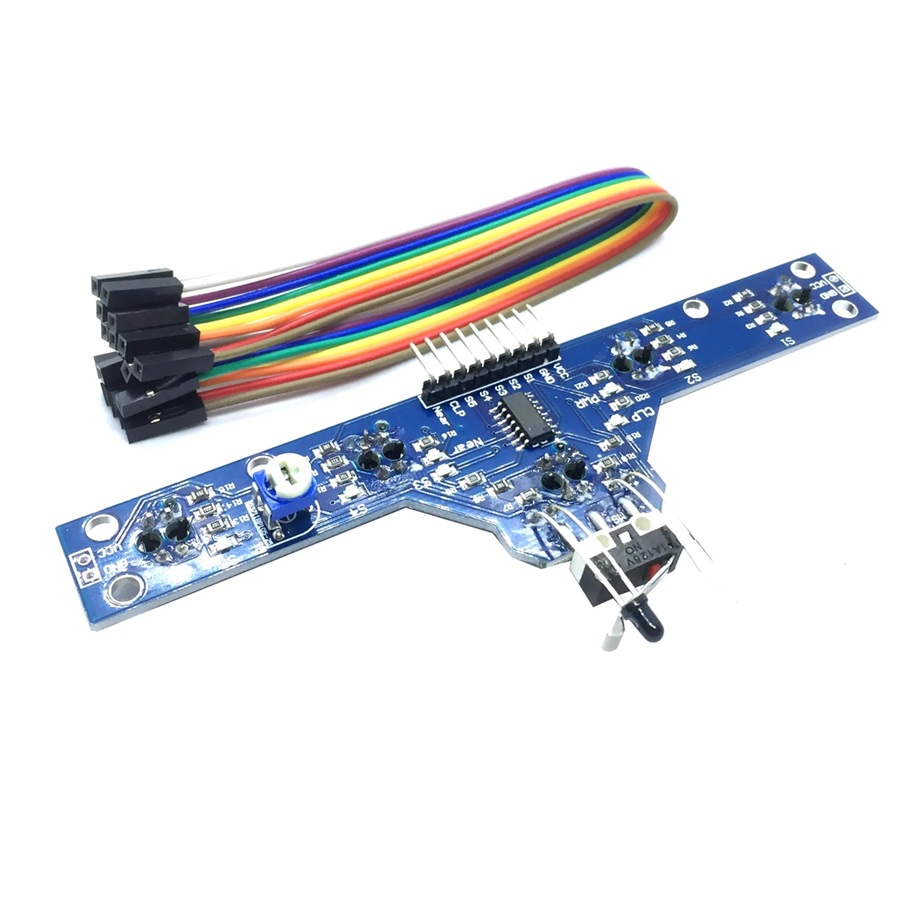
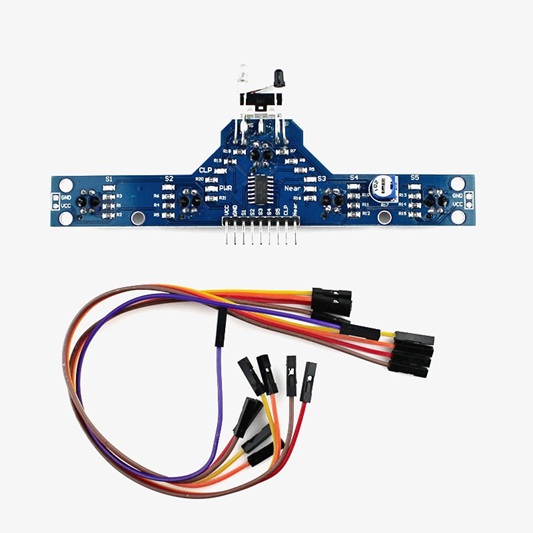
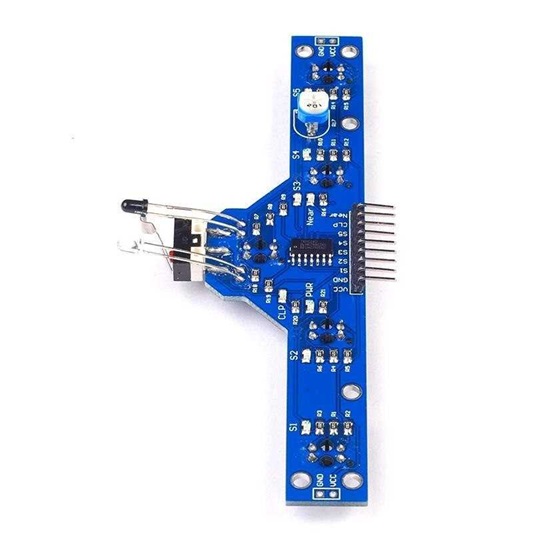
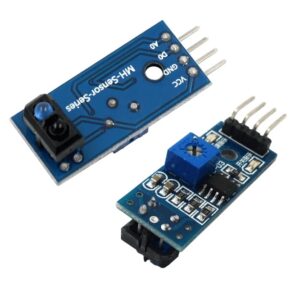
TCRT5000 5 Sensor Array With Limit Switch
Key Features and Specifications
- Core Sensors: The module uses five TCRT5000 reflective optical sensors for line detection. Each sensor contains an IR emitter and a phototransistor receiver.
- Limit Switch: A physical bump or touch sensor is included for collision detection, providing an additional digital input.
- Obstacle Avoidance: An integrated front-facing IR obstacle detection sensor, often with an adjustable range (typically 0-10 cm), provides another layer of environmental awareness.
- Outputs: The sensors typically provide digital switch outputs (high/low signals), and some versions also offer analog outputs for more precise distance and color evaluation.
- Operating Voltage: The module operates within a standard voltage range, typically 3.3V to 5V DC, making it compatible with most development boards.
- Detection Range: The optimal line-tracking distance is usually 1 mm to 25 mm, with the central point around 2.5 mm, while the obstacle detection range is adjustable.
- Indicators: On-board LEDs often provide visual feedback for each sensor’s output, aiding in debugging and testing.
Applications
The combined functionality of this array makes it a versatile tool for various robotic projects:
- Line Following: Accurately identifying and following complex black (or white) lines on a contrasting surface.
- Obstacle Avoidance: Using the front-facing IR sensor to detect objects in the robot’s path.
- Collision Detection: Utilizing the limit switch for immediate physical contact triggers.
Shaft Encoders: The individual TCRT5000 sensors can be used for position sensing or data sampling.